




16 nap a Marson
2013.03.06. 11:00
Rájöttünk, mennyire más a világ békaperspektívából nézve: néha egy bokor fának, egy domb pedig hegynek tűnik, küzdöttünk a wifi-vel, de összességében nagyon hasznos volt a marokkói MARS2013 szimulációs terepgyakorlat, aminek tanulságait most egyik mérnökünk - Kerékgyártó Tamás - foglalta össze: A marokkói terepteszt nagyon jól összerázta a csapatot. Azok az emberek, akik eddig csak Skype beszélgetésekből és e-mailekből ismerték egymást, és távmunkában rakták össze a teljes rendszert, most végre személyesen együtt tapasztalhatták meg a rover kezelhetőségét, és próbálhatták ki azokat az eszközöket éles bevetésen, amiket együtt fejlesztettek ki. Nagyon sok tapasztalat gyűlt össze, melyeknek egy része siker, más része pedig tanulság, illetve fejlesztendő terület. 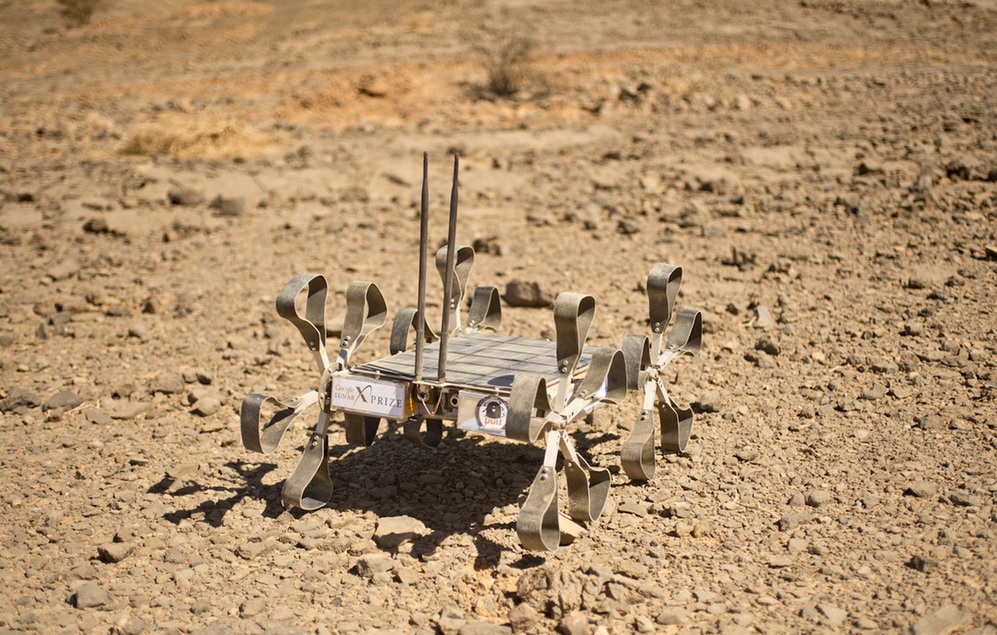
Fotó: (c) OeWF (Katja Zanella-Kux)
Nagy sikerként éltük meg a küldetésirányító csapat működését. Sikerült olyan struktúrát kialakítani, aminek segítségével gördülékenyen oldottuk meg a nem ritkán 10-12 órás, minden poszton folyamatos személyes jelenlétet igénylő műszakok lefedését. Küldetésirányító csapatunkból minden nap két műszak állt készenlétben, ezek másfél óránként váltották egymást. A csapattagok a leváltáskor vagy pihenőidőt kaptak, vagy kevesebb koncentrációt igénylő pozícióba kerültek. Minden műszakban volt egy tartalékos ember, aki bármely csapattag ideiglenes kiesése esetén be tudott ugrani a helyére addig, amíg az újra elérhető nem lesz – legyen szó pár perces egészségügyi szünetről vagy akár az ebédidőről. Ezen felül volt egy folyamatos, 24 órás ügyeletet ellátó csapatunk is, akik a rover töltöttségéért feleltek a töltési napokon, illetve ne feledkezzünk meg az útvonal-tervező csapatunkról sem: ők tervezték meg az egyes futási napok leendő útvonalát.
Szintén óriási siker számunkra, hogy a rover minden tervezett futási napon üzemképes volt! A marokkói terepteszt gyakorlatilag a harmadik volt holdjárónk földi prototípusának életében, de az első alkalom, amikor a robotot a távolból vezérelte a küldetésirányító csapat. Ráadásul eddig sohasem hagytuk mérnöki felügyelet nélkül a rovert, pláne nem ilyen hosszú időre: mindkét magyarországi futásunknál mérnökeink közül voltak páran a helyszínen – készen arra, hogy baj esetén segítsenek. Ezzel szemben a MARS2013 szimulációs terepteszt keretében 16 napon keresztül volt a roverünk külsősökre (nem Pulis csapattagokra) bízva; nekik nagyjából annyit kellett tudniuk, hogy a rover testén hol vannak azok a pontok, ahol sérülés nélkül megragadhatják a robotot a grabancánál fogva, ha szükség esetén arrébb kellene tenni. Két mérnökünk ugyanis február 8-án, két nap helyszíni rendszerellenőrzés után elhagyta Marokkót. Természetesen van min javítani: pont ezek megtalálása volt a teszt egyik célja.
A kommunikációs szoftverünkön már menet közben sokat javítottunk, ami elsősorban a felhasználói felületet tette átláthatóbbá.
A kommunikációs jel erősségével sajnos sokszor akadt gondunk, és menet közben az is kiderült, hogy a jelerősség erősen függött a rover helyétől (ezt a lengyel roverrel történt közös futás is megerősítette), így a jel erőssége mozgás közben folyamatosan változott – hol előnyünkre, hol hátrányunkra – ugyanakkor pár méterrel a felszín felett a szkafanderes szimulációk során általában jól működött. El is érkeztünk az első olyan ponthoz, ahol a problémát nem az okozta, hogy egyik vagy másik rendszer rosszul üzemelt volna, hanem az, hogy az osztrákok rendszere 2 méteres magasságban lévő szkafanderes vevőantennára volt kitalálva, nem pedig egy néhány 10 cm-es magasságban lévőre, amit a rover is használ. Robotunk jelenleg kétféleképpen képes kommunikálni az irányítóközponttal: egy, a terepen lévő helyi wifi-hálózat segítségével - ehhez természetesen kell egy reléállomás is - vagy GPRS/EDGE/3G modemes kapcsolaton keresztül. A wifi jelerősség a fentiek miatt sajnos sokszor gyengébb volt a vártnál, és sok olyan hely volt, ahol egyszerűen eltűnt, és ha wifi-lyukra futottunk (ld. korábbi cikkünket), akkor onnan már nincs se előre, se hátra. Ott már csak az ÖWF tud segíteni manuális áthelyezéssel. Mivel sivatagi körülmények között nehéz mobiltelefonos átjátszóállomást találni, a modemes kommunikációs opciót már itthon elvetettük, ráadásul a Telenoros támogatás december még csak egy volt a tervek között. A gyenge mobiltelefonos jelerősséget kinti mérnökeink később meg is erősítették: ha itt-ott volt is terepen, de akkor is csak nagyon gyengén.
Sokat segített volna, ha van már egy kész, működő leszállóegység-modellünk (lander). A tervek szerint a lander képes kapcsolatot teremteni az irányítóközponttal, fotókat készíteni és tartani a kapcsolatot a roverrel. A fentiekből következik, hogy ha a landert betettük volna egy olyan fix pontba, ahol megfelelő a wifi-jelerősség, akkor gond nélkül kolbászolhattunk volna a roverrel a környéken egy saját,már előre letesztelt, megbízható lander-rover közti wifi-összeköttetésen keresztül. 
Mindemellett azért mindennap sikerült hol többet, hol kevesebbet futni a robotunkkal. A sivatagban rovert vezetni teljesen más, mint egy bányában igazgatni az útját a helyszínen. Tájékozódni gyakorlatilag csak a képek alapján tudunk, az égtájat is sokszor a kövek árnyékából, illetve a nap helyzetéből állapítottuk meg, de néhány távolabbi hegy vagy bokor is segítségünkre volt. A terep teljesen másképp fest békaperspektívából, mint mondjuk embermagasságból. Valahogy minden közelebbinek és nagyobbnak tűnik, mint egyébként. Előfordult, hogy egy bokrot fának, vagy egy dombot hegynek néztünk. :_) A tájékozódásunkat nagyban segítette az a munka, amit a két mérnökünk végzett a két napos rendszerellenőrzés során, amikor segítettek megbecsülni a fotókon látható tárgyak távolságát sík terepen, így létrehozva egy standard rasztert – ezt a képekre ráhúzva, könnyebben tudtunk távolságokat megbecsülni, igaz, csak 4-5 méterig. Arra viszont elég volt, hogy ne menjünk neki egy-egy nagyobb kőnek, ha azok közel vannak hozzánk.
Összességében nagyon jó tapasztalat volt a MARS2013, és megerősített minket abban, hogy jó úton járunk az űrképes konstrukció fejlesztésében. Ezúton is nagy-nagy köszönetet mondunk az osztrák ÖWF-nek a szervezésért, és a folyamatos segítségért. Szponzoraink és támogatóink nélkül nem jött volna össze!
A Puli Space MARS2013 küldetésének ezüstfokozatú támogatója a HungaroControl Magyar Légiforgalmi Szolgálat Zrt.
A HungaroControl légiforgalmi irányítói évente közel 600 ezer repülőgép biztonságos közlekedéséről gondoskodnak hazánk légterében, valamint a Budapest Liszt Ferenc Nemzetközi Repülőtéren. A HungaroControl világszínvonalú technológiája, élenjáró fejlesztései és szolgáltatásai révén a nemzetközi légiforgalmi irányítás egyik legpontosabb, leghatékonyabb és legmegbízhatóbb szolgáltatója.

A Telenor Magyarország Zrt. pedig telekommunikációs eszközökkel sietett a csapat segítségére. Ezek közül különösen a két laptop és az 5 db LTE szélessávú mobil internet kulcsfontosságú, mivel a két laptopot a küldetésigazgató és a rover irányítója használja. A vezetékes Internet vagy áramkimaradás esetén (esetleg vészhelyzetben pl. tűz) az LTE kapcsolat segítségével sem szakad meg a kapcsolat az irányítás és a robot között.
![]()
![]()
Ajánlott bejegyzések:

A bejegyzés trackback címe:
Kommentek:
A hozzászólások a vonatkozó jogszabályok értelmében felhasználói tartalomnak minősülnek, értük a szolgáltatás technikai üzemeltetője semmilyen felelősséget nem vállal, azokat nem ellenőrzi. Kifogás esetén forduljon a blog szerkesztőjéhez. Részletek a Felhasználási feltételekben és az adatvédelmi tájékoztatóban.
gingko 2013.03.08. 16:33:59
Hogy akartok megtenni vele 500 m-t, vagy pláne 5 km-t, ha az első wifi-árnyék lebénítja? Vagy ez ipari titok? :P Bocs, ha hülye a kérdés.
Az érdekelne még nagyon, hogy álltok a hordozó-leszállóegység-tárgyalásokkal? Van már bármi publikus infó evvel kapcsolatban?
2013.03.12. 20:34:46

zaza42 2013.04.07. 09:03:34
szegedcafe.hu/2013/04/07/marsjaro-robotok-szegeden/
Egy dolgot emelnék ki: "A középiskolások, illetve egyetemisták alkotta harminc csapat saját építésű robotjai között voltak villámgyorsak, akadtak, melyeket lépésről lépésre irányítottak, így mozgása kissé darabos volt, némelyik pedig saját szenzoraival próbált tájékozódni."
A puli meg képek alapján tájékozódik és becsül meg távolságot radar helyett (lol), és még mindig manuálisan irányítják. Ez a többéves "fejlesztés" eredménye; vicc az egész.
flyhigh 2013.04.07. 14:30:41
Az altalad emlitett robotokhoz a kovetelmenyeket es a kuldetes leirasat megtalalod a verseny hivatalos oldalan.
A kovetelmenyeket, a kuldetes leirasat a holdra keszulo Pulihoz megtalalod a GLXP es a Puli oldalan, de sok hasznos info van a pl. a Lunar and Planetary Institute webodalan, a Nasa Technical Reports Serveren (nemsokara online megint) is. Akar a Wikipedian is olvasgathatsz az egyszeruseg kedveert, hogy megtudd mibol all valamit az urbe, a Holdra kuldeni es ott mozogni vele. De meg annyira messze nem is kell menni, itt ez a blog, rengeteg infoval :)
Az ur, a Hold nem high-techseget kovetel, hanem mukodest es megbizhatosagot nagyon extrem korulmenyek kozott, olyanok kozott, amik altalaban nagyon nehezen vagy egyaltalan nem reprodukalhatoak itt a foldon. A Puli ezekre az extrem korulmenyekre keszul, es ezeket figyelembe veve van tervezve, fejlesztve.
Az altalad emlitett robotok epitese a versenyre es a Puli rover epitese a Holdra is nagyszeru kuldetes, kemeny munka, amire a resztvevok sok energiat es szurkeallomany kapacitast aldoznak. Viszont a feladat komplexitasa es nehezsege vs. ehhez szukseges ido & koltseg grafikonon a ket projekt kozotti kulonbseget szemleletesen meg lehetne mutatni. Erre utaltal is, csak helytelen feltetelezessekkel, a kuldetesek targyat figyelembe nem veve (a Puli nem irodai padloszonyegen, ismert, kiepitett palyan valo mozgasra keszul)
Igen, 30 csoport epitett cool kutyuket hobbibol - es 1 magyar GLXP resztvevo csapat fejleszt Holdra szant rovert onkentes tagokkal, hobbibol. Pedig lehetne 30 magyar Holdra keszulo csapat is, megsincs. Ennek valoszinu van koze a kuldetes komplexitasahoz, es a megvalosoitashoz szukseges kovetelmenyekhez.
zaza42 2013.04.10. 12:53:25
Hát szerintem nagyon nem. Ennek ahhoz van köze, hogy mérnök szemlélettel teljesen reálisan látják a helyzetet, hogy egy magyar fejlesztésű rover sosem fog egy ilyen horderejű versenyt megnyerni. Felesleges beszállni, csak az időt és a pénzt viszi.
Aki meg tényleg hisz ennek akár részleges sikerében is, az meg pont annyira ért hozzá, hogy egy távirányítós autóra szerelt mobillal szerencsétlenkednek a sivatagban, és örül neki. Érdemes elolvasni azt a "szakmai" posztot, ahol gyakorlatilag nem teszteltek semmit se, csak jót mókáztak, meg fotózkodtak.
Például nem nehéz belátni, hogy az első pulidesign a "szöges" lábaival/kerekeivel teljesen haszontalan konstrukciónak tűnt már elsőre is - ők ezt több hónap alatt vették észre. Kiváncsian várom, hogy mikor jönnek rá, hogy kormányozható kerekekkel jelentősen lehet csökkenteni az áramfelvételt, és nem pazarló módon, tank módjára közlekedni. Nem véletlen, hogy az összes működő rover fordítható kerekekkel üzemel. Ez a design jól mutat a médiafotókon, oszt ennyi. Ahogy a szöges design is csak a parasztvakítás része volt.

lacalaca · http://cydonia.blog.hu 2013.04.10. 13:19:58
FYI, minden tiszteletem a Magyarok a Marsonban résztvevő srácoknak, de a te érveléseddel mennének inkább kapálni, mert a 30 kütyü közül egynek sem lesz köze a Marshoz, akkor meg minek erőlködnek egyáltalán (vö. Puli sose jut le a Holdra).
Az megvan, ugye, hogy azzal a robottal, ami csak tanulópénz a leendő, űrképes változathoz, egy hónapon át üzemeltünk Marokkóban, hardveres vagy szoftveres probléma nélkül, letesztelve minden hardveres és szoftveres részegységet, amit eddig leőállítottunk? Igen arról van szó, ami neked csak fotózkodás meg jópofizás a sivatagban. Kicsit más feladat csarnokban, apuci kezétől méterekre, sík felületen, előre megadott feladatokat teljesíteni, meg ezer kilométerről a pusztában, homokviharban, ismeretlen terepen távirányítani egy robotot, meghibásodás nélkül.
FYI2: "A puli meg képek alapján tájékozódik és becsül meg távolságot radar helyett (lol)"
Felmerült-e benned, hogy mindez nem azért van, mert komplett idióták volnánk? (Tippelek, nem.) Hanem azért, mert ha tudunk sztereóképekkel is navigálni, tudod, mint azok a béna izék, mondd már, Opportunity, meg a másik, a nagy böhöm darab, na szóval ha tudunk képek alapján, akkor _NEM_KELL_ radar, ami spórol nekünk súlyt és energiafogyasztást (ami áttételesen ismét spórol súlyt). Ha spórolunk súlyt, megspórolhatunk DOLLÁRMILLIÓKAT, merthogy kiló per Holdra jutás árfolyam akörül mozog.
zaza42 2013.04.24. 17:00:39
Nem értek mindenhez, csak annyira, ahogy még a gimiben tanították.
"FYI, minden tiszteletem a Magyarok a Marsonban résztvevő srácoknak, de a te érveléseddel mennének inkább kapálni, mert a 30 kütyü közül egynek sem lesz köze a Marshoz, akkor meg minek erőlködnek egyáltalán (vö. Puli sose jut le a Holdra)."
Leírtam, hogy az a verseny az önálló tájékozódásról szólt, és igazából software verseny volt hardware helyett. És sokat lehet tanulni belőle a diákoknak. (Ahogy az általános iskolás csíráztassunk-krumplit kísérlet se arra való, hogy ne haljunk éhen.) A tanuláson volt a hangsúly, és hobbiból rakták össze.
"Az megvan, ugye, hogy azzal a robottal, ami csak tanulópénz a leendő, űrképes változathoz, egy hónapon át üzemeltünk Marokkóban, hardveres vagy szoftveres probléma nélkül, letesztelve minden hardveres és szoftveres részegységet, amit eddig leőállítottunk?"
Hardware = 4 kerék + motor?
Software = jobba-balra-előre-hátra, videostreaming?
Hatalmas teszt. Még az aksi se a napelemből lett töltve, hanem mindig a bázison. Szerintem még be is takargatták meg jóéjtpuszit is adtak neki. Ha 1 hónapra kibasszák a sivatagba, hogy műholdon navigálódjon magától, nnna az teszt lett volna. De ez a néhány száz méteres körözés eléggé nudli, lássuk be. Ilyet egyszerű csinálni: veszel egy kisautót bármelyik játékboltban, rácelluxozol egy mobilt, és írsz egy usb-s vezérlést, oszt csoki. Bármely műszaki egyetemen/főiskolán ez egy hétvégés program lehetne.
"Felmerült-e benned, hogy mindez nem azért van, mert komplett idióták volnánk?"
Nem komplett idióták. Azok nem fogják fel, hogy havi néhány óra melóval meg fotózkodással kaphatnak szponzorlaptokokat.
"Hanem azért, mert ha tudunk sztereóképekkel is navigálni..."
Itt csak egy kérdésem van: MIÉRT NEM??? Valaki szabotálta a munkát az elmúlt 2 évben? Két képet összemontázsolni sztereoba ugyancsak nem atomfizikát igénylő tudomány. Ha ennek még beta változata se készült el ennyi idő alatt, akkor ez mindent elmond a project komolyságáról.
Arról meg már nem is írok hosszasan, hogy eddig minden rovernek forgatható kamerái voltak, hogy körbe tudjon nézni legalább. Itt még ennyi sincs. Pedig ezzel már túl lehetne szárnyalni a kisautó+kamerás mobil párost.
(Meg komolyan most így egymás közt: mekkora már írni egy sw-t, ami 2 képet grayscale-be konvertál, utána ráhúz egy piros és kék layert, majd egy merge-t; puff: stereokép. Tetszőleges programnyelven beugró feladat lehetne zh-k előtt.)
De ez a legszebb, komolyan: "Ha spórolunk súlyt, megspórolhatunk DOLLÁRMILLIÓKAT, merthogy kiló per Holdra jutás árfolyam akörül mozog. "
www.wisegeek.com/what-are-launch-costs.htm
"Typical launch costs today are $10,000 US Dollars (USD) to $25,000 USD per kilogram ($4,500 to $11,000 USD per pound), though some countries subsidize space launches, occasionally reducing cost as low as $4,000 USD per kilogram ($1,800 USD per pound)."
Ez egy hónapos adat. Tehát ha a puli 120 kilo lenne, és a dollármillió tényleg többesszám, akkor 2millió dollárt lehet spórolni 80 kilón, és a puli máris csak 40 kg-ot nyomna. Csak én érzem azt, hogy még a 40 kg-on is bőven belül van/lesz a jószág, és összesen nem fog 1millió dodóba se fájni?
Csak nekem fáj ez a fajta guglihasználatot mellőző tájékozatlanság?
lacalaca · http://cydonia.blog.hu 2013.04.24. 17:26:51
pulispace.com/hu/media/hirek/224-mars2013-second-week-one-rover-battles-on-the-field-the-other-flies-to-madrid
FYI 2: google-fu-t számonkérni elég nagy öngól, mikor LEO (~400 km) adatokat hivatkozol, a Hold meg 384 400-re van. Vagy akkor számold bele a Hold-irányú fokozat és a lander súlyát, illetve a szorzót, amivel ezek nőnek, ha a rover 1 kg-t hízik. Vagy csak guglizz:
www.astrobotic.com/lunar-services/
"The baseline price is $900,000 per lb. ($2 million/kg)..."
"Hardware = 4 kerék + motor?
Software = jobba-balra-előre-hátra, videostreaming?"
Az, hogy te ennyit látsz/vagy hajlandó látni belőle, legyen a te problémád. Nyugodtan szapuld tovább, nem te leszel az első, de van jobb dolgunk nekünk is, mint ilyeneken vitatkozni.
zaza42 2013.04.28. 21:40:12
Tegyük hozzá, h ezek eléggé fiktív árak, mert még konkrétan egy rover se landolt a holdon a hidegháború óta. (Kínai kütyü lehet, de arról semmit sem tudunk.) Ez a szám annyira sokatmondó, minthogy mennyiért lehet a holdon telket vásárolni.
Ha igazán a spórolás lenne a cél, akkor saját landert terveznének a puli köré, és máris dollármilliókat spóroltak azzal, h fellövetik magukat a mikrogravitációba, onnan meg "saját lábon" eljut a holdig. Ez igazi spórolás lenne a szponzorhajhászás helyett. Sőt: ha működőképes is lenne, akkor lehetne árulni a szolgáltatást másoknak. Csak sajna ha még a rover is ilyen iskolás szakkör jelleggel készül, akkor landert összerakni tényleg nem fog sikerülni.
"Az, hogy te ennyit látsz/vagy hajlandó látni belőle, legyen a te problémád."
Hát sajna pont ennyi jön le a cikkekből és semmi több. Ez ilyen politikus-jelenség, hogy zárt aktákat lobogtatnak, amiben amúgy minden benne van, de senki nem nézhet bele. Szerintem senki se tiltakozna, ha több info ömlene a puliról a szokásos pr fotózás mellett.
Amit meg linkeltél cikk, ott azért nézd meg a különbséget a pulis és egyéb képek között: iszonyatosan ratyi az a kamera, ami bele van rakva. Egy 5rugós androidos teló szebb képeket csinál. Önmaga paródiája ez 2013-ban, hogy ilyen minőségű képeket mernek a cikkhez csatolni.
lacalaca · http://cydonia.blog.hu 2013.04.28. 22:20:05
zaza42 2013.04.28. 23:03:19
Most jöhetnének a technikai részletek, amik túlmutatnak egy titkolózó politikus habitusán.