




Egy űreb testrészei: a Puli szíve
2013.09.30. 09:00
Arról már korábban többször is szó volt itt a blogon, hogy holdjárónk földi tesztelésre szánt prototípusát Iteráció 2-esnek (I2-es) becézzük - hiába, a csapatban túlsúlyban vannak a mérnökök, fizikusok, ezt az arányt tükrözi a fölöttébb kreatív névválasztás is. Ez azonban nem változtat azon a tényen, hogy az I2-es verzió célja előkészíteni az utat a későbbi, immár űrképes (I3-as) prototípus számára, hogy abban már minden flottul működjön.
Korábban már bemutatkozott a Puli lába és teste - mai posztunkban a Puli "szíve" kerül terítékre: az elektronika.
Az űrképes rendszernek különleges környezeti körülmények között kell majd működnie, ahol nagy a valószínűsége az alkatrészek meghibásodásának - és kicsi a valószínűsége annak, hogy valaki épp arra járva kicserélje őket. Ezért az űrképes rendszereket a biztonság szempontjából kritikus rendszerek tervezésekor alkalmazott elvek alapján kell megtervezni, úgymint: modularitás, redundancia, diagnosztika, újra- illetve át- konfigurálhatóság (ezeket a szavakat sem egy bölcsész jegyezte fel).
Az I2-es elektronikai alkatrészei nem űrképesek, viszont a kerekek meghajtására használt motorok már igen: gyártója ugyanaz, amelyik a NASA által a Marsra küldött roverek motorjait is készítette. Maradjunk annyiban, hogy nem gyenge a cucc.
Roverünk elektronikája moduláris felépítésű, az egyes áramkörök jól elkülöníthetőek egymástól, mindnek külön feladata van. Egyes áramkörök kritikus elemeiből a biztonság kedvéért kettőt is beépítettek mérnökeink, így a rendszer akkor is működőképes marad, ha az egyik bedobja az unalmast.
A rendszer jelenleg három fő elemből áll, úgymint: PSU (Power Supplying Unit), SBC (Single Board Computer) és MDR (Motor DRiver) motorvezérlők (minden motornak külön-külön egy-egy). Az egységek közötti kommunikáció az iparban széles körben elterjedt RS-485 alapú hálózaton működik, és Modbus-protokollt használ - jellemezte egyik csillogó szemű mérnökünk, ezek a varázsszavak rajta kívül valószínűleg mindenki más számára feltörhetetlen enigmával egyenlőek.
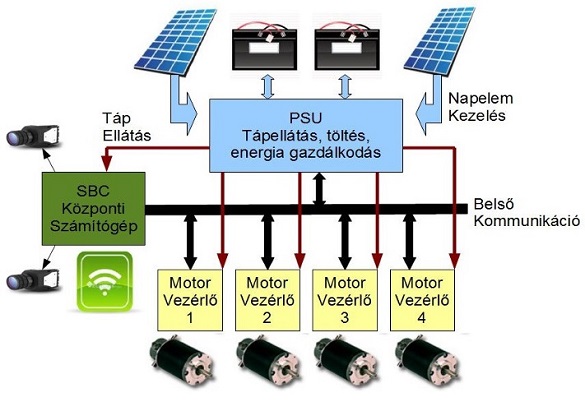
A PSU feladata az akkumulátorok töltése, illetve a napelemből, vagy a roverre csatlakoztatható kábelből érkező energia szétosztása a különböző rendszerek között. Akkumulátoraink Ni-MH cellákból állnak; bár teljesítményben elmaradnak pl. a Li-Po akkumulátoroktól, alkalmazásuk biztonságosabb. Ez különösen a későbbiek folyamán lesz szempont, amikor a holdjárónak sokkal erősebb mechanikai behatásokban lesz része (pl. rakétaindításkor, landoláskor, szakadékba bucskázáskor).
A PSU az elektronikai rendszer igazi szíve, ráadásul lemerült akkumulátorokkal is képes feléledni. A legtöbb redundancia a PSU-ban található, mivel a tápellátás kritikus a rendszer működése szempontjából. Ezért a PSU két külön napelem-bemenettel rendelkezik, két külön akkumulátort képes tölteni – fogyasztani (akár konkurensen is), azaz két külön töltő áramkörrel rendelkezik. A két egység közül bármelyik kiesése nem befolyásolja a PSU, illetve a rover működését. A PSU automatikusan kezeli az akkumulátorokat: ha az egyik lemerül, pikk-pakk átáll egyik akksiról a másikra, a lemerült akkumulátort pedig elkezdi tölteni. A PSU szintén automatikusan képes ki-bekapcsolni a rendszer többi részének a tápellátását, attól függően, hogy adott pillanatban mennyi kraft áll rendelkezésre.
Talán nem okoz meglepetést, hogy a Puli holdjáró motorvezérlő áramkörei egy-egy motorhoz hozzárendelten működnek, tehát minden motornak külön vezérlő áramköre van. Ezzel egyrészt ismét csak redundanciát - azaz üzembiztonságot - biztosítunk a rendszernek (a rover design képes 2 üzemképesen maradt motorral is megtenni a GLXP 500 méteres követelményét, csupán a terepmászó képesség csökken), másrészt viszont a piacról beszerezhető, sugárzásálló, űrképes és még viszonylag olcsón is elérhető mikrovezérlők számítási kapacitásukban, illetve ki- és bemeneteik számában nem bizonyulnak elégségesnek ahhoz, hogy az összes motort egyetlen eszközzel lehessen meghajtani. Ezek a motorvezérlők ugyanis több szenzor adatát (pl. hőmérséklet, Hall-szenzor) is fogadják, majd ezeket a központi számítógép felé továbbítják.
 A holdjárót egy központi számítógép vezérli. Ezen egy Java alapú vezérlőszoftver fut, így tudunk parancsot adni a motorvezérlőknek és az energiaellátásért felelős PSU-nak, illetve ez a bizonyos SBC rendelkezik rádiókkal, amik segítségével az irányítóközponttal kommunikál. Az irányítóközpont az SBC-n keresztül tartja szemmel a PSU állapotát (akkumulátorok állapota, töltés állapota), illetve a motorvezérlők (motor által felvett áram, motor tápfeszültség, motor fordulatszám) paramétereit, ezek más néven a telemetriai adatok.
A holdjárót egy központi számítógép vezérli. Ezen egy Java alapú vezérlőszoftver fut, így tudunk parancsot adni a motorvezérlőknek és az energiaellátásért felelős PSU-nak, illetve ez a bizonyos SBC rendelkezik rádiókkal, amik segítségével az irányítóközponttal kommunikál. Az irányítóközpont az SBC-n keresztül tartja szemmel a PSU állapotát (akkumulátorok állapota, töltés állapota), illetve a motorvezérlők (motor által felvett áram, motor tápfeszültség, motor fordulatszám) paramétereit, ezek más néven a telemetriai adatok.
Az I2-re váró fejlesztések közül meg kell említeni a robotkarokat vezérlő elektronikákat ADR (Arm DRiver), amely a rover elejére kerülő, forgatható sztereo-kamerákat, illetve a hátuljára kerülő pozicionálható antennakonzolt mozgató szervomotorokat vezérli majd.
Az I2 után egészen hihetetlen módon az I3 következik, ezen már dolgozunk: ennek a típusnak az áramköreit már űrképesre tervezzük. Ezek a villamos alkatrészek többnyire már más költségkategóriában vannak, és beszerzésük is több macerával jár. Elektronikájának ugyanis már bírnia kell az igencsak heves rázkódásokat is, és el kell viselnie a földinél sokkal erősebb háttérsugárzást is, ami a világűrben - és később a Holdon - vár majd robotunkra.
Elektronikai tervezésünket már az egyik piacvezető szoftver segíti, az Altium Designer. Holnap, október 1-jén partnerünk, a HT-Eurep Electronic Kft. Altium szemináriumán is bemutatjuk a Pulit.
![]()

Az I2-es már keményen meggyötörtük a marokkói sivatagban, most azonban a Hawaii szigetén található, NASA által is támogatott PISCES központba szeretnénk eljuttatni holdjárónk földi prototípusát, ahol szintén jól megfuttathatjuk a távoli terepen. Ahhoz azonban, hogy odáig eljuthasson a rover, mindenkinek a segítségére szükségünk van - a Tiedre is. Ezen az indiegogo-s kampányon keresztül támogathatod a Hawaii tereptesztet. A támogatás jutalommal is jár: a Kis Lépés Klub tagság a minimum, de limitált-szériás Puli-póló, üvegtömbbe lézergravírozott és 3d-nyomtatott mini-rover is jár a nagyobb összegekért. Sőt, twittelni is lehet majd a roveren keresztül Hawaii-ról!

Ajánlott bejegyzések:





A bejegyzés trackback címe:
Kommentek:
A hozzászólások a vonatkozó jogszabályok értelmében felhasználói tartalomnak minősülnek, értük a szolgáltatás technikai üzemeltetője semmilyen felelősséget nem vállal, azokat nem ellenőrzi. Kifogás esetén forduljon a blog szerkesztőjéhez. Részletek a Felhasználási feltételekben és az adatvédelmi tájékoztatóban.
öt görög 2013.09.30. 20:05:12
bemondja az unalmast
Értem én, miért pont "nem gyenge a cucc", zavar is kellőképpen, de a fenti már a pongyolaság így meg úgy satöbbi.